DPTSI ITS adakan Webinar Pengembangan Robot Otonom
Pemaparan rangkaian topik yang akan dibahas dalam webinar DPTSI ITS bersama TechSource Systems
Kampus ITS, ITS News – Direktorat Pengembangan Teknologi dan Sistem Informasi Institut Teknologi Sepuluh Nopember (DPTSI ITS) bersama TechSource Systems mengadakan webinar membahas pemanfaatan aplikasi Matlab untuk pengembangan robot otonom. Diadakan secara berkelanjutan, webinar ini bertujuan memperluas wawasan mahasiswa tentang perancangan robot.
Manajer Teknik Aplikasi TechSource Systems, Ian Alferez, mengatakan terdapat tiga topik utama terkait pengembangan robot otonom yang dibahas. Ketiga topik tersebut berfokus pada pemanfaatan platform untuk pengembangan Quadrupled, Ground Vehicle Robot, dan Humanoid Robot. “Akan dibahas juga mengenai sistem pengoperasian robot dengan Matlab dan sistem navigasi,” terangnya.
Quadrupled Robot sendiri adalah salah satu robot otonom terbaik diantara semua robot berkaki, khususnya dalam mobilitas dan keseimbangan. Robot otonom ini sering digunakan untuk membantu penderita tunanetra. Sedangkan Ground Vehicle Robot merupakan robot otonom yang didesain untuk menangkap data yang berada di area yang berbahaya, kotor, maupun terpencil. “Adapun Humanoid Robot itu robot otonom yang bentuknya menyerupai dan dapat berinteraksi dengan manusia,” tambahnya.
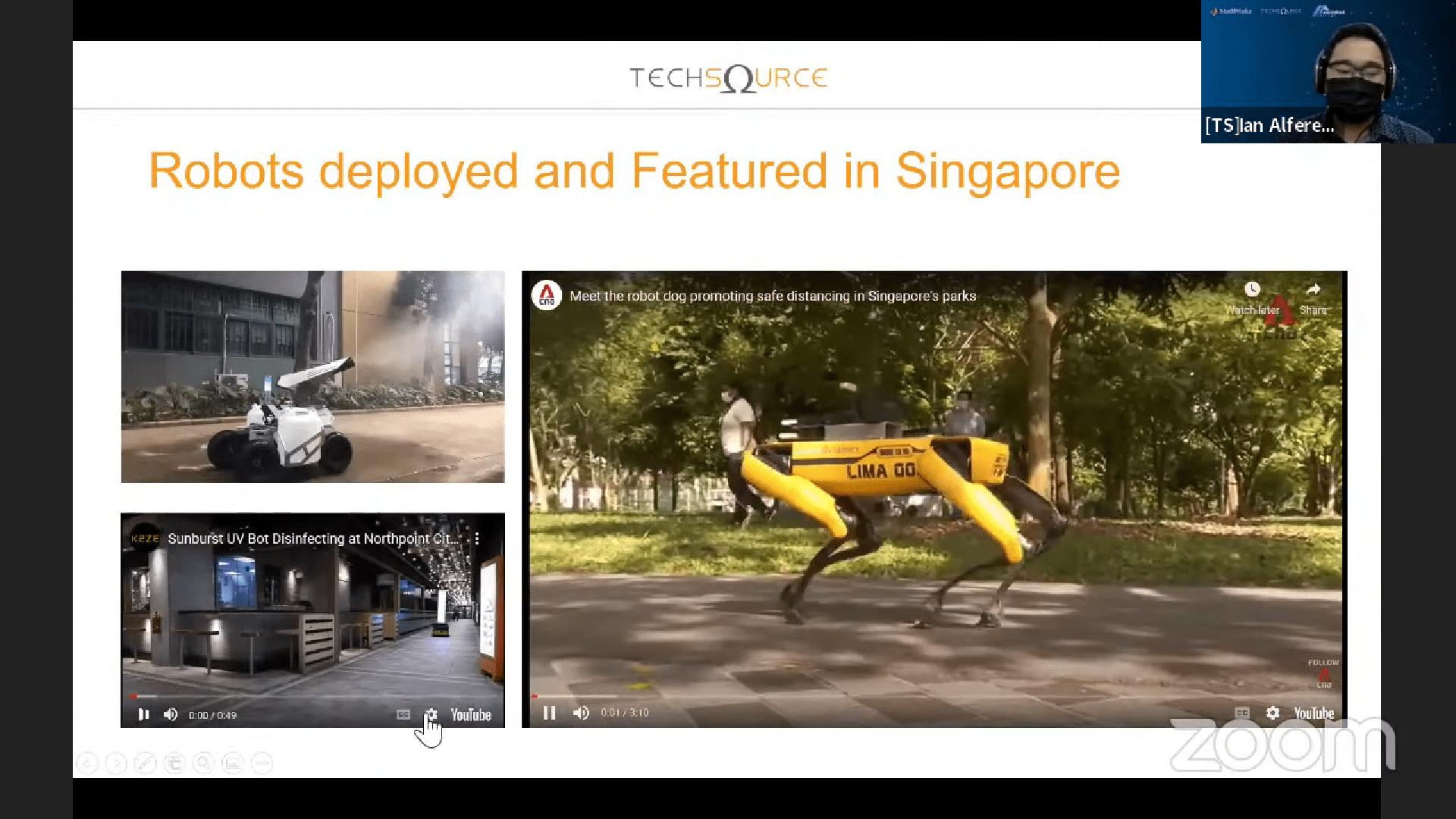
Pemaparan video mengenai demonstrasi robot otonom di Singapura
Ia sendiri berpendapat bahwa robot otonom saat ini dibutuhkan oleh manusia untuk mempermudah pekerjaan. Kelebihannya, robot otonom dapat beradaptasi secara mudah di lingkungan dinamis dan berkolaborasi secara aman dengan manusia. “Namun, di sisi lain robot otonom memerlukan desain yang rumit dan beberapa perpaduan fungsi,” ucap alumnus University of San Carlos, Filipina ini.
Penciptaan robot otonom sendiri akan dipermudah jika pencipta telah menguasai beberapa software seperti Python, C++, atau Matlab. Aplikasi Matlab yang dijelaskan lebih lanjut dalam seminar ini sendiri dapat digunakan untuk mengimpor beberapa metode pemodelan robot seperti model fisik, model abstrak, dan model eksternal robot. Model robot tersebut kemudian dapat diproses lebih lanjut melalui fitur Simulink.
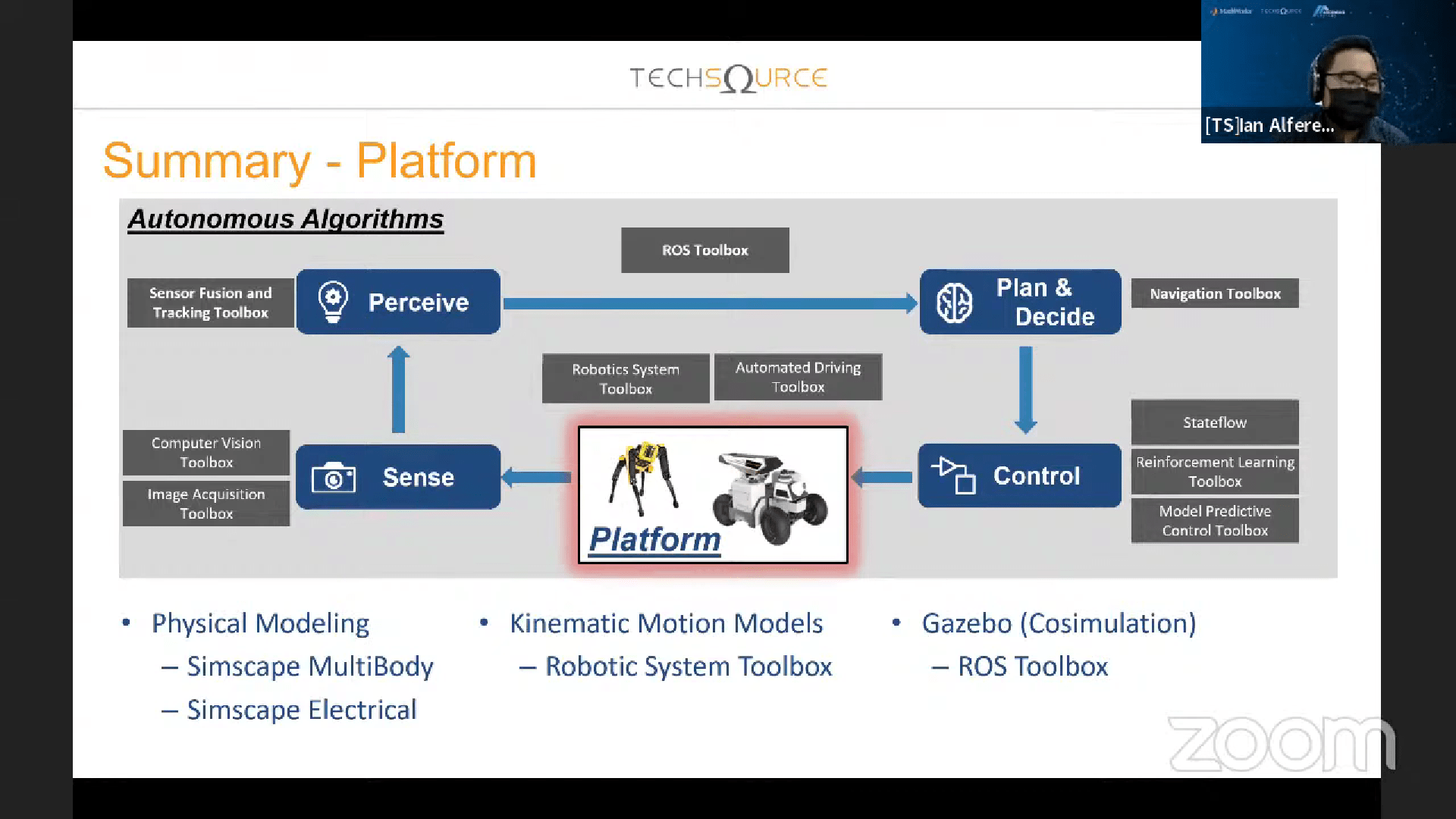
Ian Alferez memaparkan rangkuman topik pada sesi pertama webinar
Bentuk fisik robot yang telah dibentuk dari berbagai aplikasi Computer Aid Design (CAD) seperti Solidworks atau Onshape diimpor untuk diproses lebih lanjut melalui Simulink. Nantinya, perancang robot dapat melakukan pemodelan kinematika yang berfungsi untuk penciptaan bentuk persamaan dalam sistem. “Pemodelan ini dapat mengatur pose dan orientasi robot,” jelas pria yang telah tersertifikasi Matlab Trainer ini.
Dalam pemrograman robot otonom sendiri juga terdapat empat algoritma penting yang harus diperhatikan. Keempat algoritma tersebut seperti perceive yang bersinggungan dengan gabungan sensor dan pelacakan, sense yang meliputi akuisisi gambar dan pandangan, plan and decide bersinggungan dengan navigasi, dan control yang bersinggungan pada stateflow, reinforcement learning toolbox, dan semacamnya.
Ia pun menekankan kembali bahwa algoritma otonom ini harus diterapkan dengan baik oleh mahasiswa maupun tenaga didik (tendik). Hal tersebut akan menghasilkan sebuah robot yang tak hanya otonom, namun canggih dan bermanfaat bagi masyarakat luas. “Harapannya dapat membantu masyarakat yang ingin berkecimpung di bidang teknologi informasi dan digital,” harapnya. (*)
Reporter: Bima Surya Samudra
Redaktur: Septian Chandra Susanto
Berita Terkait
-
Kolaborasi ITS dengan BPBD Jatim, Luncurkan VR Simulasi Bencana
Kampus ITS, ITS News — Menyokong antisipasi terjadinya bencana serta terus berupaya mengedukasi masyarakat, Institut Teknologi Sepuluh Nopember (ITS) melalui
01 April 2022, 22:04 -
Abmas ITS Manfaatkan Fasilitas Migas Pascaoperasi Menjadi OTEC
Kampus ITS, ITS News — Transisi menuju energi terbarukan menjadi fokus utama demi lingkungan yang berkelanjutan. Mendukung hal tersebut,
01 April 2022, 22:04 -
Lewat STP, ITS Berupaya Perkuat Hilirisasi Produk Riset
Kampus ITS, ITS News — Sektor industri memainkan peran yang cukup penting dalam meningkatkan daya saing di pasar global. Mendukung
01 April 2022, 22:04 -
EVITS Jadi Solusi Transportasi Ramah Lingkungan di Dishub Jatim
Kampus ITS, ITS News — Institut Teknologi Sepuluh Nopember (ITS) melalui PT ITS Tekno Sains semakin dipercaya untuk mendukung sektor
01 April 2022, 22:04