Guru Besar ITS Kembangkan Sistem Kontrol Robotik bagi Manusia

Prof Dr Trihastuti Agustinah ST MT kala memaparkan hasil orasi ilmiahnya yang bertajuk Sistem Kontrol Robotik: Tantangan dan Peluang
Kampus ITS, ITS News — Sistem kontrol robot telah mengalami revolusi signifikan akibat cara manusia berinteraksi dengan mesin dalam berbagai bidang. Melihat hal tersebut, Guru Besar (Gubes) Institut Teknologi Sepuluh Nopember (ITS), Prof Dr Trihastuti Agustinah ST MT, terdorong untuk menjalani sebuah kajian mendalam mengenai cara mengoptimalkan sistem kontrol robot transpor.
Perempuan yang akrab dipanggil Tuti ini mengungkapkan, hasil pemikiran dan penelitiannya ini tertuang dalam orasi ilmiah berjudul Sistem Kontrol Robotik: Tantangan dan Peluang. Kontrol robotik, mirip dengan otak yang membantu robot membuat keputusan, menentukan pergerakan, dan beradaptasi dengan kompleksitas kebutuhan manusia yang terus meningkat.
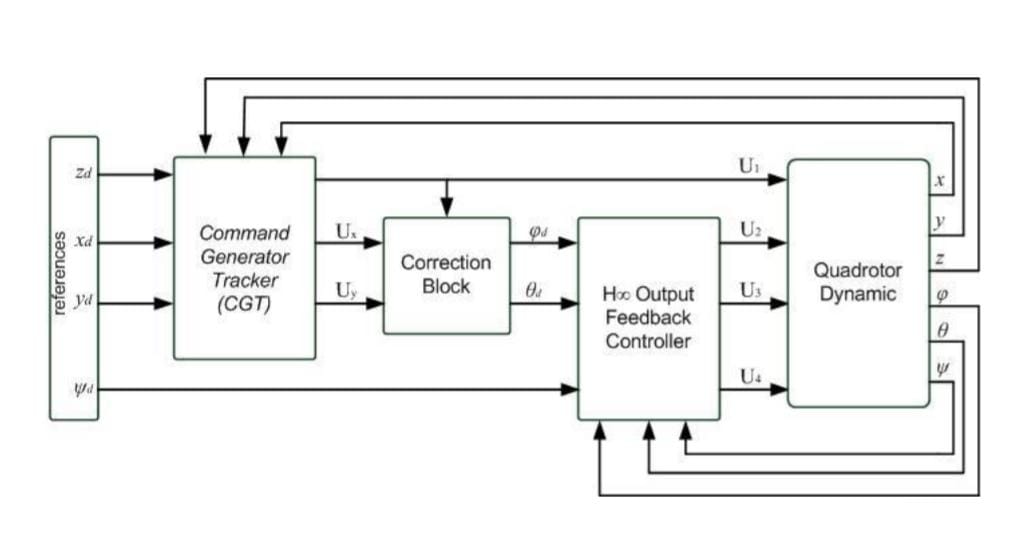
Skema sistem kontrol robot pada quadrotor yang dirancang Prof Dr Trihastuti Agustinah ST MT pada penelitiannya
Tuti menjelaskan, ia memilih sistem kontrol robotik sebagai fokus penelitiannya karena potensinya yang amat menguntungkan dalam membangun masa depan manusia. Sistem kontrol robotik, selaku otak dari robot, dapat menunjang berbagai kebutuhan hidup manusia. “Mulai dari mengembangkan industri manufaktur, perawatan kesehatan, tugas rumah sehari-hari, hingga eksplorasi luar angkasa,” terangnya.
Sebagai contoh, Tuti melakukan penelitian kepada robot transpor, seperti quadrotor atau robot terbang dan mobile robot. Kedua robot yang biasanya dimanfaatkan untuk logistik tersebut memerlukan sistem kontrol robotik yang cakap untuk mempertahankan dan menentukan stabilitas, pelacakan, serta metode penghindaran rintangan. “Hal ini penting karena ketiganya merupakan unsur utama mobilisasi kedua robot,” ucapnya.

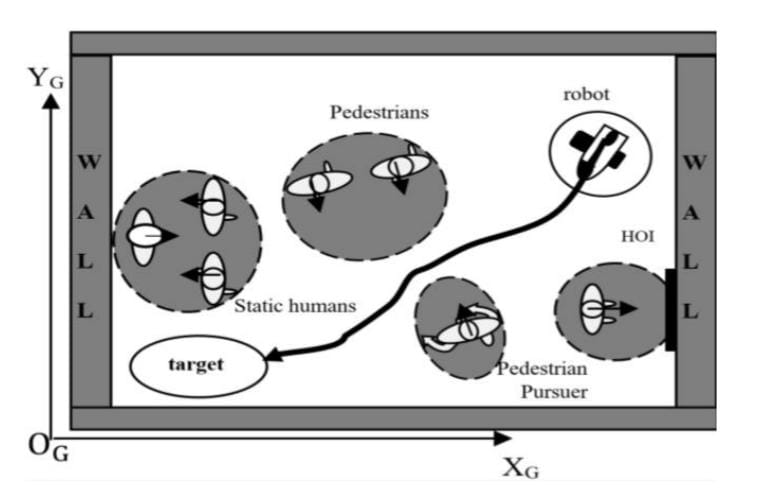
Guru Besar (Gubes) ITS ke-165 Prof Dr Trihastuti Agustinah ST MT menunjukkan skema mobile robot ketika uji coba metode penghindaran
Gubes ke-165 ITS itu telah melakukan kajian yang mendalam terhadap strategi pengendalian sistem robot dengan penekanan yang kuat pada aspek stabilitas dan akurasi pelacakan. Selain itu, ia juga telah berupaya untuk mengidentifikasi metode yang efektif dalam melindungi robot dari kemungkinan hambatan yang dapat muncul.
Secara khusus, pada robot quadrotor, Tuti menerapkan metode H-infinity output feedback dan Command Generator Tracker (CGT). Lebih dalam, H-infinity output feedback untuk membantu mengendalikan sistem robot agar tetap stabil dan responsif terhadap perubahan, sehingga robot dapat meminimalkan gangguan yang akan diterima. Selain itu, metode ini juga dipilih karena sifatnya yang fleksibel, sederhana, dan memiliki desain yang sangat efisien.
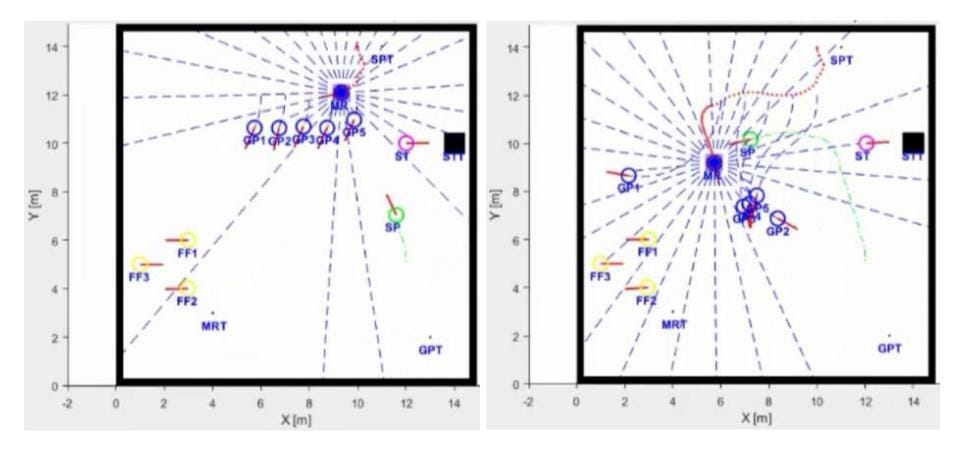
Metode penghindaran mobile robot ketika hendak disimulasikan di lingkungan manusia
Lain halnya dengan CGT yang berperan untuk mengoptimalkan fungsi tracking pada robot. Berdasarkan penelitian, CGT nantinya akan memandu robot menemukan keberadaan sinyal informasi. “Setelah itu, CGT akan memberi arahan kepada robot untuk melacak keberadaan sinyal dan pergerakan selanjutnya,” tambah perempuan asal Pamekasan ini.
Dalam penelitian berikutnya yang digeluti oleh Tuti, ia mengkaji bagaimana robot transpor dapat bergerak tanpa mengancam keselamatan manusia melalui penggunaan mobile robot. Mobile robot sendiri merupakan jenis robot yang mampu berpindah tempat di lingkungan manusia. “Dengan itu, digunakan metode Hybrid Velocity Obstacles (HVO) berbasis Headed Social Force Model (HSFM),” jelasnya.
Ilustrasi mobile robot menjauhi pengejar dan menghindari manusia saat uji coba
Meskipun sudah menemukan pendekatan dan metode yang tepat, profesor dengan fokus ilmu bidang robotika tersebut membeberkan penerapan sistem kontrol robot ini masih dalam pengembangan. Ia dan grup risetnya masih perlu mengoptimalkan berbagai aspek agar fungsi logistik robot dapat maksimal ketika beroperasi bagi manusia.
Dengan demikian, penelitian Tuti diharapkan dapat memberikan kontribusi yang berarti dalam pengembangan robot yang aman dan efisien dalam berinteraksi dengan manusia. Terkhusus, optimalisasi sistem kontrol robotik di bidang logistik yang dapat terealisasi dengan maksimal. “Hadirnya inovasi kontrol robot dapat segera direalisasikan guna memberi kebermanfaatan kepada masyarakat,” pungkasnya bangga. (HUMAS ITS)
Reporter: Hibar Buana Puspa
Berita Terkait
-
Badak LNG Melalui DTMM ITS Kenalkan Industri Gas Alam Cair
Kampus ITS, ITS News — Institut Teknologi Sepuluh Nopember (ITS) terus membuka pintu kolaborasi guna meningkatkan kompetensi mahasiswanya dalam
25 September 2023, 15:09 -
ITS Tembus Peringkat 77 Dunia versi THE Interdisciplinary Science Rankings 2025
Kampus ITS, ITS News — Institut Teknologi Sepuluh Nopember (ITS) kembali mengukir prestasi dengan menempati posisi ke-77 dunia dan peringkat
25 September 2023, 15:09 -
ITS – PWNU Jatim Aktualisasikan Spirit Sepuluh Nopember Melalui Sarasehan Kebangsaan
Kampus ITS, ITS News — Memperingati Hari Santri Nasional (HSN) 2024, Institut Teknologi Sepuluh Nopember (ITS) bersama Pengurus Wilayah
25 September 2023, 15:09 -
Kemnaker Dukung ITS Siapkan Tenaga Kerja Era Society 5.0
Kampus ITS, ITS News — Dalam upaya mempersiapkan generasi muda untuk menghadapi kompleksitas pasar kerja nasional, Institut Teknologi Sepuluh
25 September 2023, 15:09