1st Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, January 26, 2022
Information





1st Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology
Neural Electronic Engineering Laboratory
Division of Biomedical Engineering for Health and Welfare
Graduate School of Biomedical Engineering
Tohoku University
Sendai, Japan
Biocybernetics Laboratory
Department of Biomedical Engineering
Institut Teknologi Sepuluh Nopember (ITS)
Surabaya, Indonesia
Schedule:
Date: January 26, 2022
Time: 13.00 Surabaya /15.00 Sendai
Venue: Online (Zoom Meeting)
Abstracts
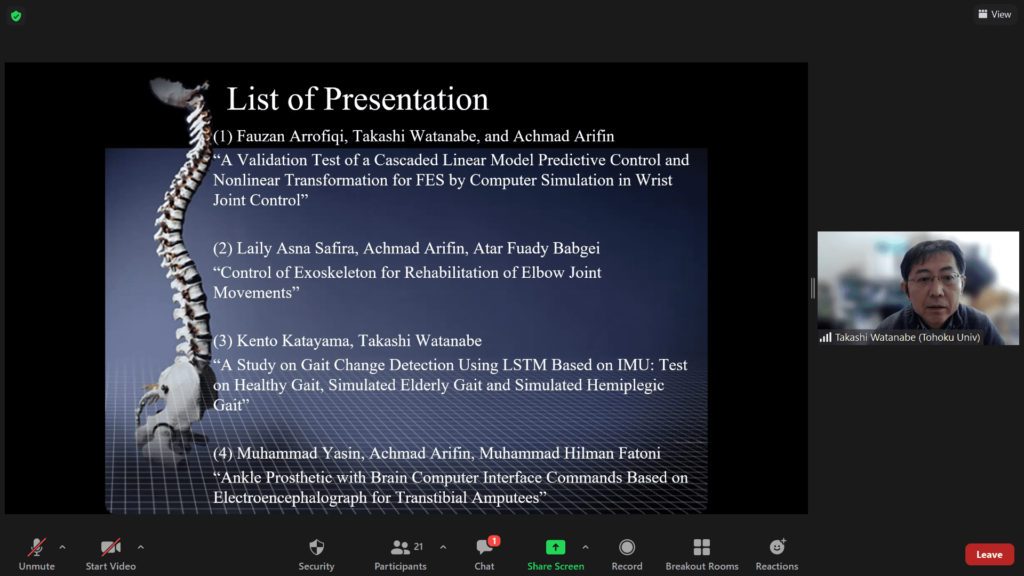
A Validation Test of a Cascaded Linear Model Predictive Control and
Nonlinear Transformation for FES by Computer Simulation in Wrist Joint Control
Fauzan Arrofiqi1, Takashi Watanabe1, and Achmad Arifin2
1 Graduate School of Biomedical Engineering, Tohoku University, Japan
2 Biomedical Engineering Department, ITS, Indonesia
Functional Electrical Stimulation (FES) is an effective method of restoring functional movement of limbs paralyzed by spinal cord injury or cerebrovascular disease. Basically, controlling limb movement with FES to achieve the desired functional movement is a difficult task because the response of the electrically stimulated musculoskeletal system is highly nonlinear with long time delays. Therefore, an appropriate control method is needed to address it. In this study, a linear Model Predictive Control (MPC) was developed by utilizing an average model and a simple nonlinear transformation to deal with the above problem. The average model used in MPC aims to eliminate the modelling process for new subjects, thereby reducing the time-consuming initial setup for practical applications. The nonlinear transformation was used to map the output of linear MPC as a linear solution to obtain a nonlinear solution. A validation test of the proposed controller was accomplished through computer simulation in wrist joint control. The control results showed that the proposed controller worked well and was able to track the target movement trajectory with a small tracking error. An average model in MPC and a simple nonlinear transformation were suggested to be useful for practical FES application.
Control of Exoskeleton for Rehabilitation of Elbow Joint Movements
Laily Asna Safira1, Achmad Arifin1,2, Atar Fuady Babgei2
1 Graduate Program of Electrical Engineering ITS, Indonesia
2 Biomedical Engineering Department ITS, Indonesia
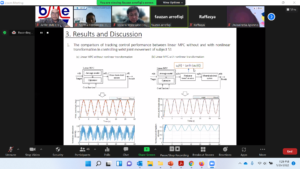
A robotic rehabilitation system to assist therapists in restoring motor function of paralyzed subjects by repetitive flexion-extension movement training has been designed in this study. The system was realized as an elbow joint exoskeleton using a DC motor that was controlled based on a range of motion. Movements of the exoskeleton were measured using a rotary encoder embedded in the dc motor. PID controller was used to regulate the DC motor PWM signal to achieve movement targets. The experimental test was carried out by evaluating the system by 120-degree range of motion. The results showed a success rate of 83.3%. Finally, the method of detection of voluntary movements by using the current system is also shown to be significant in tracking the progress of rehabilitation.
A Study on Gait Change Detection Using LSTM Based on IMU: Test on Healthy Gait, Simulated Elderly Gait and Simulated Hemiplegic Gait
Kento Katayama1, Takashi Watanabe2
1 Graduate School of Engineering, Tohoku University, Japan
2 Graduate School of Biomedical Engineering, Tohoku University, Japan
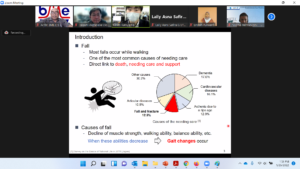
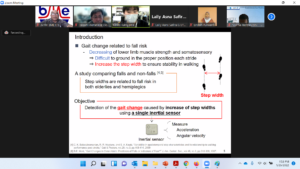
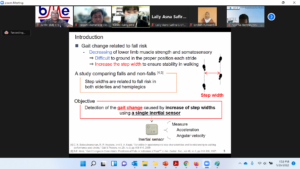
In order to predict the occurrence of falls, gait change detection would be effective. In this study, gait change detection using a neural network model based on Long Short-Term Memory (LSTM) was examined. The LSTM model was designed to predict the value of the next time step at each time step of the input data, and was trained with the gait data before the gait change measured by a single IMU. That is, this method does not require the data after the gait change as the training data because the gait change is detected by the prediction error when the IMU signal is input to the LSTM trained with the data before the gait change. In hemiplegic patients and the elderly, the increase of step width has been suggested to be associated with fall risk. Therefore, in this study, the increase of step width was detected as a gait change. The evaluation was conducted not only healthy gait, but also simulated elderly gait and simulated hemiplegic gait. The results suggest that the method of gait change detection is useful not only for healthy gait but also for nonmonotonous gait such as simulated elderly gait and simulated hemiplegic gait.
Ankle Prosthetic with Brain Computer Interface Commands Based on Electroencephalograph for Transtibial Amputees
Muhammad Yasin, Achmad Arifin, Muhammad Hilman Fatoni Biomedical Engineering Department ITS, Surabaya, Indonesia
Amputation is usually done to treat a condition or a disease. Lower limb amputations account for 85-90% of all amputations, and transtibial amputation is the most common type of amputation surgery. To live a normal life, the transtibial amputees choose to use assistive devices in the form of crutches or passive prostheses. The use of the passive equipment is still limited due to user’s functional needs as closed as possible to the natural one. Motivated by the points above, an active ankle prosthesis for transtibial amputees using EEG signal has been designed. 2 channels C3/C4 EEG signal were measured using a self-designed EEG instrumentation amplifier and analog filters. The ankle prosthesis was implemented based open source 3d design data with fitting to subject anthropometric. The design was finalized by 3d printing process with PLA material in our laboratory. Features of the EEG signals in the form Event Related Synchronization (ERS) and Event Related Desynchronization (ERD) were extracted from real-time EEG signals during motor execution and motor imagery tasks. In the preliminary experimental test with 2 normal subjects success rate of motor execution and motor imagery task were less than 50%. In case of subject B, motor imagery is more detectable than the motor execution. Due to the current progress of this development, redesign of analog signal processing, and exploring of other feature extraction methods would be addressed.






Latest News
-
4th Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, October 19, 2022
4th Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology Neural Electronic Engineering Laboratory Division of Biomedical Engineering for
-
3rd Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, September 21, 2022
3rd Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology Neural Electronic Engineering Laboratory Division of Biomedical Engineering for
-
Policy of Development on Rehabilitation Engineering, April 30, 2022
National and Institutional Policies of Rehabilitation Indonesian Government all Indonesian Citizens and Residences as a mandate of the