2nd Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, March 16, 2022
Information





Neural Electronic Engineering Laboratory
Division of Biomedical Engineering for Health and Welfare
Graduate School of Biomedical Engineering
Tohoku University
Sendai, Japan
Biocybernetics Laboratory
Department of Biomedical Engineering
Institut Teknologi Sepuluh Nopember (ITS)
Surabaya, Indonesia
Schedule:
Date: March 16, 2022
Time: 13.00 Surabaya /15.00 Sendai
Venue: Online (Zoom Meeting)
Presentation list:
(1) Sherelle Clairine Hayadi, Achmad Arifin, Josaphat Pramudijanto
A Design of Wearable Functional Electrical Stimulation (FES) System for Elbow Joint Movements with Fuzzy-PID Controller
(2) Toshinori Watanabe, Takashi Watanabe
Preprocessing of IMU signals for center of mass position estimation using ANN
(3) R. Ajeng Zilvana Rizqi Aini, Achmad Arifin, Hendra Kusuma, Andra Risciawan
Design and Test of Exoskeleton Robot for Elbow and Shoulder Joint Movements Training of Post Stroke Subjects
(4) Ken Higuchi, Takashi Watanabe
A Comparison of Accuracy of Gait Event Detection by U-Net Using IMU Under Different Reference Signals
A Design of Wearable Functional Electrical Stimulation (FES) System for Elbow Joint Movements with Fuzzy-PID Controller
Sherelle Clairine Hayadi, Achmad Arifin, Josaphat Pramudijanto
Biomedical Engineering Department, ITS, Surabaya, Indonesia
Abstract
Stroke is the second leading cause of death and the third leading cause of motor disorder worldwide. Functional Electrical Stimulation (FES) has been used as a method in restoring the motor disorder. Surface FES provides programmed electrical stimulation pulses to induce muscle contraction by surface electrodes. Sophisticated FES control systems have been explored to determine the capability to overcome problems in FES induced joint movements. In this work, a wearable FES system for elbow flexion-extension movements restoration of hemiplegic subjects. The stimulator was a single channel monophasic stimulator consisting of a boost converter and pulse generator. This stimulator stimulates the biceps brachii muscle to create elbow flexion, and the triceps brachii muscle to create elbow extension. The control method was Fuzzy-PID, where the fuzzy controller tuned the PID parameters in determining the intensity of the stimulation pulses. Elbow joint movement was tracked by two 3-axis accelerometer sensors which were placed in the forearm and upper arm coronally. The designed system was tested with normal subjects in step response and in extension/flexion movements with sinusoidal trajectory target. Adding a fuzzy controller provided faster risetime, while to the sinusoidal trajectory target test provided an RMSE reduction of about 1°. The current results recommended experimental test with more subjects especially with upper limb paralyzed subjects.
Preprocessing of IMU Signals for Center of Mass Position Estimation Using ANN
Toshinori Watanabe*, Takashi Watanabe**
* Graduate School of Engineering, Tohoku University, Japan
** Graduate School of Biomedical Engineering, Tohoku University, Japan
Abstract
Center of mass (CoM) position is useful for evaluating balance during walking. However, CoM position estimation using optical motion capture or force plate is limited to use in laboratory environments. On the other hand, inertial measurement units (IMUs) are suitable for gait evaluation at homes and in clinics. In this report, an artificial neural network (ANN) to map the signals from IMUs to the CoM position was designed and the preprocessing of the input signals was studied. Four healthy subjects were asked to perform 4 different walking tasks, which were measured with IMUs attached on upper trunk, thighs, shanks, and feet and optical motion capture. The IMU signals were used for input for the ANN and the CoM position estimated using optical motion capture was used to train the ANN. The cutoff frequency of the low-pass filter applied to the IMU signals was examined. The result showed that the lower cutoff frequency of the low-pass filter for the acceleration signals improved estimation accuracy, although the cutoff frequency for the angular velocity signals to improve estimation accuracy was different for components. It was considered that the low-frequency components of the acceleration signals were important for estimation.
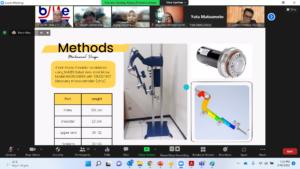
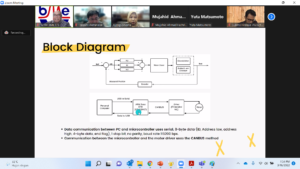
Design and Test of Exoskeleton Robot for Elbow and Shoulder Joint Movements Training of Post Stroke Subjects
R. Ajeng Zilvana Rizqi Aini *, Achmad Arifin *, Hendra Kusuma *, Andra Risciawan **
* Biomedical Engineering Department, ITS, Surabaya, Indonesia
** Manufaktur Robot Indonesia (MRI), Surabaya, Indonesia
Abstract
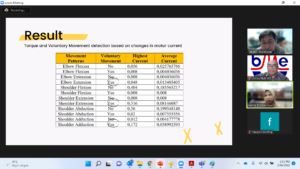
Post-stroke motor disorders in the upper extremities, including hemiplegia, can inhibit daily activities. Patients need rehabilitation to improve basic motor skills to restore and restore upper extremity movement function. In this research, a prototype of a robotic exoskeleton was created that can be used as a training system as part of upper extremity rehabilitation system. The exoskeleton consists of brushless motor DC with embedded PID controllers. Command for the system was developed on a laptop PC interfaced to the embedded system by an ARM microcontroller. Patterns of the movements of this training system are extension/flexion for elbow joint, and extension/flexion, abduction/adduction of the shoulder joint. Experimental tests were performed with 2 normal subjects. RMSE values were 4.17o, 4.25o, and 4.18o for elbow joint extension/flexion, shoulder joint extension/flexion, and shoulder joint abduction/adduction movements, respectively. The embedded current measurement of the motor made it possible to detect subject responses to the robot arm movements. Monitoring of subject improvements for long term of rehabilitation can be performed based on monitoring and evaluation of the current. Next agenda is addressed to explore more the control performance of the system in differences subjects with several differences responses.
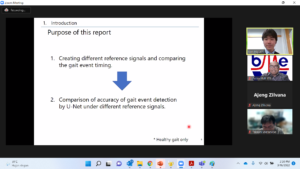
A Comparison of Accuracy of Gait Event Detection by U-Net Using IMU under Different Reference Signals
Ken Higuchi, Takashi Watanabe
Graduate School of Biomedical Engineering, Tohoku University, Japan
Abstract
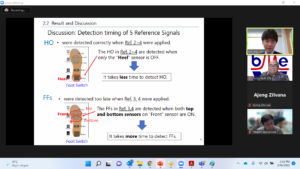
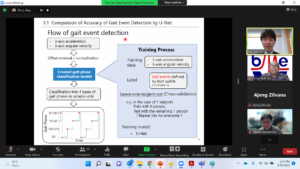
Patients with motor dysfunction, such as paralysis and muscle weakness, need rehabilitation training to improve their motor functions. For quantitative and objective evaluation of them, our research group has been developing motion measurement systems using Inertial Measurement Units (IMUs). In our previous study, a method to automatically detect the gait events timings from IMU signals on the foot using deep learning was tested. For the deep neural network, U-Net was applied to classify four gait phases. However, the reference signals of the gait events created from pressure sensors (foot switches) included data with earlier or later timing, especially on the Heel Off (HO) and the Foot Flat start (FFs). In this study, the accuracy of gait events detection under different reference signals was compared. Detection rules of the HO and the FFs timing by foot switches were changed and five different reference data were created. One of the reference data included the absolute value of the acceleration as a threshold value. The results showed that although some reference signals had the right timing of the gait events, variation of error of detection timing increased. Moreover, it was also suggested that including IMU signals as a threshold could reduce variation of the detection timing error.






Latest News
-
4th Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, October 19, 2022
4th Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology Neural Electronic Engineering Laboratory Division of Biomedical Engineering for
-
3rd Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology, September 21, 2022
3rd Joint Laboratory Seminar on Rehabilitation Engineering and Assistive Technology Neural Electronic Engineering Laboratory Division of Biomedical Engineering for
-
Policy of Development on Rehabilitation Engineering, April 30, 2022
National and Institutional Policies of Rehabilitation Indonesian Government all Indonesian Citizens and Residences as a mandate of the