[26 Juni 2024] 8th Joint Seminar on Rehabilitation Engineering and Assistive Technology
Informasi





Pada hari Rabu, 26 Juni 2024 Departemen Teknik Biomedik menyelenggarakan 8th Joint Seminar on Rehabilitation Engineering and Assistive Technology. Kegiatan ini berlangsung secara online melalui Apk Zoom.
Presentation list:
1) Measurements of Center of Pressure Change and Lower Limb Kinematic of Gait during Pregnancy
Aminy Widinal Hartiningrum1, Achmad Arifin2
1. Graduate Program of Electrical Engineering, ITS, Surabaya, Indonesia
2. Biomedical Engineering Department ITS, Surabaya, Indonesia
2) A Study on Closed-Loop FES Control of Wrist Joint Angle with Forearm Posture Changes: Effect of Simple Gain Adjustment
Junichi Ito, Takashi Watanabe
Graduate School of Biomedical Engineering, Tohoku University, Sendai, Japan
3) Hybrid Rehabilitation System of Exoskeleton and Functional Electrical Stimulation (FES) for Restoring Elbow Joint Movements with Fuzzy Co-activation Model
Sirsta Hayatu Elparani, Achmad Arifin, Fauzan Arrofiqi
Biomedical Engineering Department, ITS, Surabaya
4) Fundamental Study of Deep Learning-based Approach for Gait Event Detection of Hemiplegics with Limited Training Data
Ryusei Sato1, Ken Higuchi2, Takashi Watanabe2
1. Graduate School of Engineering, Tohoku University
2. Graduate School of Biomedical Engineering, Tohoku University
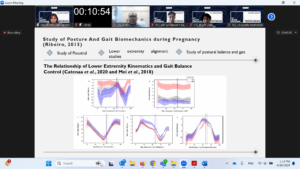
Measurements of Center of Pressure Change and Lower Limb Kinematic of Gait during Pregnancy
Aminy Widinal Hartiningrum1, Achmad Arifin2
1 Graduate Program of Electrical Engineering, ITS, Surabaya, Indonesia
2 Biomedical Engineering Department ITS, Surabaya, Indonesia
Abstract
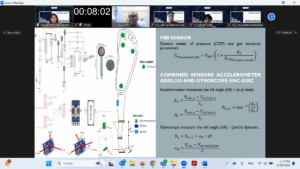
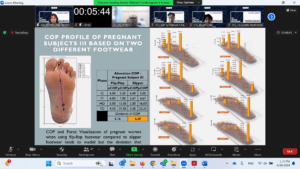
Since human feet bear body weight, they play a crucial role in daily life activities. The increase in joint load due to increasing of body mass during pregnancy will certainly affect the postural balance and walking balance of pregnant women. Therefore, a wearable measurement system with pressure sensor and accelerometer-gyroscope fusion sensors was developed to study kinematics of pregnancy gait. Measurements were performed with five pregnant women. Results showed that the gait of pregnant women compare to a normal gait had center of pressure (COP) position tends to the medial direction with a more diffuse COP deviation, decreased flexion and increased extension of the knee joint, and decreased plantarflexion of ankle joint. Pregnant women in this study more stable when using flip-flop footwear design than slipper. It is indicated with more diffuse COP when using slipper footwear design, but the pronation trend (medial-anterior direction) was shown when using flip-flop footwear design. Difference of gait timing and decreasing of range of motion were also observed. Some approaches of welfare are required to improve daily life quality of pregnant women due the change of kinematics.
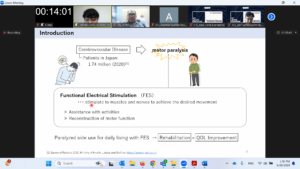
A Study on Closed-Loop FES Control of Wrist Joint Angle with Forearm Posture Changes: Effect of Simple Gain Adjustment
Junichi Ito, Takashi Watanabe
Graduate School of Biomedical Engineering, Tohoku University, Sendai, Japan
Abstract
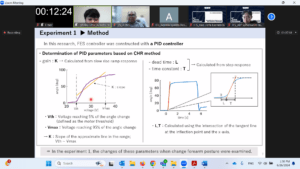
Functional electrical stimulation (FES) is effective in assisting with activities of daily living and for use in rehabilitation. One of the challenges in control with FES is to achieve closed-loop control. In the case of surface electrical stimulation, the relationship between the electrode location and the muscle changes, and the effect of gravity also changes, by postural changes due to joint movements. However, the closed-loop FES controller that takes these changes into account has not been realized. Therefore, this research examined the effectiveness of a method of changing the gain of the closed-loop FES controller in movement control. In this research, the control target is dorsiflexion angle of the wrist joint in different forearm postures (taking into account the effects of gravity, pronation and supination). A closed-loop FES controller was constructed with a PID controller. Electrical stimulation was applied to the extensor carpi radialis (ECR) and the flexor carpi ulnaris (FCU). Electrodes were attached based on the vertical-neutral posture. First, the gain of the PID controller was measured in each of the 9 postures of the forearm, that is defined by combination of forearm direction (vertical, horizontal and middle defined in 45° direction) and rotation (pronation, neutral and supination). The results showed that the gain of the PID controller changed depending on the forearm posture. Next, a method of varying the PID gain based on forearm posture was tested with1 healthy subject. In this method, the gain for each posture was calculated in real time using acceleration measured by inertial sensors attached to the forearms. Comparing PID controller with variable gain and the PID controller with fixed gain, RMSE decreased in 7 of 9 postures, and settling time decreased in 5 of 9 postures. The decreases in control accuracy were considered to be due to changes in the motor threshold of electrical stimulation with changes in forearm posture. It is considered that a closed-loop controller taking into account the motor threshold as well as the gain would be necessary.
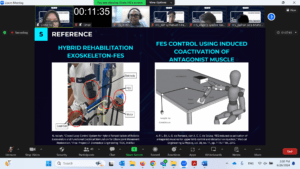
Hybrid Rehabilitation System of Exoskeleton and Functional Electrical Stimulation (FES) for Restoring Elbow Joint Movements with Fuzzy Co-activation Model
Sirsta Hayatu Elparani, Achmad Arifin, Fauzan Arrofiqi
Biomedical Engineering Department, ITS, Surabaya
Abstract
Post stroke patients with paralyzed limbs require a proper rehabilitation system to restore motor functions. In this study a method that combines Functional Electrical Stimulation (FES) and a robotic exoskeleton for upper limb movements has been developed. For a stage of rehabilitation in which some improvement of motor control has been shown, this hybrid approach is hoped to improve the role of the FES in generating more precise movements and the exoskeleton in stabilize limb movement during rehabilitation sessions. The stimulation intensity for biceps brachii (elbow flexor) and triceps brachii (elbow extensor) were determined automatically by fuzzy co-activation model based on muscle function and a PID controller that regulated control action based on feedback control law. By this approach of design, the number of controllers to regulate two-channel electrical stimulation has been minimized. Additionally, stimulation pattern for agonist and antagonist muscle could be generated automatically based on the fuzzy system. This method has been tested with normal subjects simulated hemiplegic subjects in controlling elbow joint movements. The fuzzy co-activation model can map joint angle to stimulation pattern for each muscle successfully, and the PID controller maintained small errors to follow movement targets. Experimental results also showed that complex output membership functions improved the stimulation patterns. The fuzzy co-activation model in hybrid exoskeleton-FES rehabilitation can be expected to improve the efficiency of upper limb motor rehabilitation in stroke patients.
Fundamental Study of Deep Learning-based Approach for Gait Event Detection of Hemiplegics with Limited Training Data
Ryusei Sato1, Ken Higuchi2, Takashi Watanabe2
1 Graduate School of Engineering, Tohoku University
2 Graduate School of Biomedical Engineering, Tohoku University
Abstract
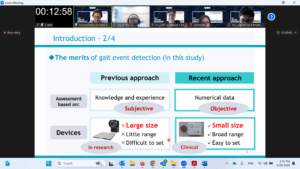
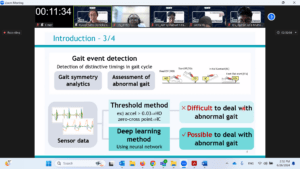
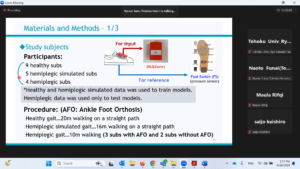
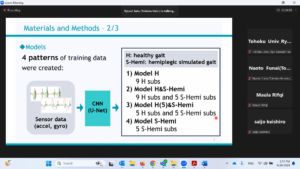
Correctly identifying different gait patterns caused by motor dysfunction is essential to ensure that patients receive appropriate treatment and rehabilitation strategies. Our research group has been developing a gait event detection method using a 3D accelerometer and gyroscope data from the Inertial Measurement Unit (IMU). In the previous method, gait events of initial contact (IC), foot-flat-start (FFs), heel-off (HO), and toe-off (TO) were detected at empirically determined values of some parameters set for each subject using a single IMU mounted on the foot. However, when this method was applied to abnormal gait, it wasn’t easy to set appropriate parameter values due to individual differences in gait and waveform complexity. A deep learning-based approach for gait event detection requires no empirical knowledge and can be applied to complex waveforms. As it is challenging to gather a large training dataset of patients, methods are required that necessitate only a small training dataset. In this study, a single deep-learning model was used to examine the accuracy of gait event detection, when trained on limited datasets (i.e., healthy gait and hemiplegic simulated gait) for reducing data from patients. Participants included 9 healthy subjects, 5 hemiplegic simulated subjects, and 4 hemiplegic subjects. Some hemiplegics were also measured using Ankle Foot Orthosis (AFO). Data were collected from a single IMU while walking on a straight path. The timings of the gait events for the reference were obtained from the footswitch. Gait events detected by using a deep learning model were evaluated in terms of the detection rate (the rate of events with a detection timing error of 400ms or less). The model utilized a U-Net structure. Four patterns of training data were created by changing the content ratio of healthy gait and hemiplegic simulated gait. The data measured with hemiplegic subjects were used only to test 4 trained models. The results indicated that a model trained on only simulated hemiplegic gait achieved a high detection rate (95%≤) regardless of orthosis use. With respect to detection timing error, models trained on combined healthy and hemiplegic simulated gait data showed a lower standard deviation than the model trained on only hemiplegic simulated gait. Thus, the combination of healthy gait and simulated gait would be an effective approach to reduce data from patients.
Latest News
-
[16 April 2025] Kuliah Tamu Proyek Desain Semester Genap 2024-2025 dengan Tema Introduction to Business Model Canvas
rangka mendukung mata kuliah Proyek Desain Semester Genap 2024/2025. Kegiatan ini mengusung tema Introduction to Business Model Canvas yang bertujuan
-
[13 April 2025] Syukuran Pelepasan Sarjana 131
Pada tanggal 13 April 2025, Mahasiswa Departemen Teknik Biomedik mengadakan kegiatan Syukuran Pelepasan Sarjana ke-131. Berikut ini foto dokumentasi
-
[9 April 2025] Kuliah Tamu Proyek Desain Semester Genap 2024-2025 dengan Tema Pre-startup Knowledge
Pada hari Rabu, 9 April 2025, Departemen Teknik Biomedik, Fakultas Teknologi Elektro dan Informatika Cerdas, Institut Teknologi Sepuluh Nopember