Misi utama kami adalah untuk mengeksplorasi sains, teknik dan peran sosial dari bidang rekayasa sistem dan kontrol melalui pemanfaatan robotika dan manajemen perawatan. Hal ini bertujuan untuk menangani berbagai proses dalam industri agar dapat menggantikan pekerjaan manusia. Tantangan utama untuk mewujudkan hal tersebut adalah sifat manusia yang tidak dapat ditebak, tidak terstruktur dan tidak pasti. Laboratorium RSK merupakan kolaborasi unik yang memanfaatkan kekuatan dan ketrampilan kolektif dari para anggota dan mitra kerjasama. Saat ini kami terlibat aktif dalam projek lintas – displin ilmu dan lintas – negara.


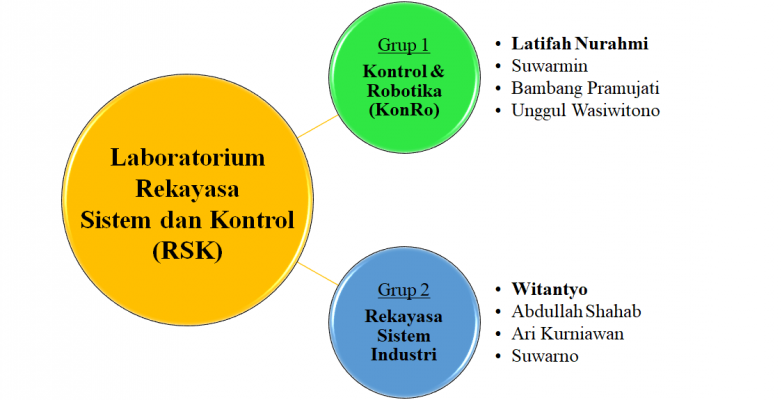
STRUKTUR ORGANISASI LABORATORIUM

Latifah Nurahmi, Ph.D
Sinta | Scopus | Google Schoolar
Bidang: Kinematika and Dynamics of Robotics
Email: latifah.nurahmi@gmail.com
")
Bambang Pramujati, PhD
Sinta | Scopus | Google Schoolar
Bidang: Robotika, Kontrol dan Otomasi
Email: pramujati@me.its.ac.id
")
Witantyo, M.Eng., SC
")
Unggul Wasiwitono, Dr-Eng

Suwarmin, MT.PE

Abdullah Shahab, Prof
")
Ari Kurniawan, ST, MT
Sinta | Scopus | Google Schoolar
Bidang: Robotika, Kontrol, dan Otomasi
Email: arikurniawan@me.its.ac.id
ROADMAP LABORATORIUM REKAYASA SISTEM DAN KONTROL

GRUP RISET DAN PENELITIAN
Laboratorium Rekayasa Sistem & Kontrol memiliki 2 fokus Grup Riset, yaitu:
- Riset Grup Kontrol & Robotika
- Riset Grup Rekayasa Sistem Industri
1. GRUP RISET KONTROL DAN ROBOTIKA

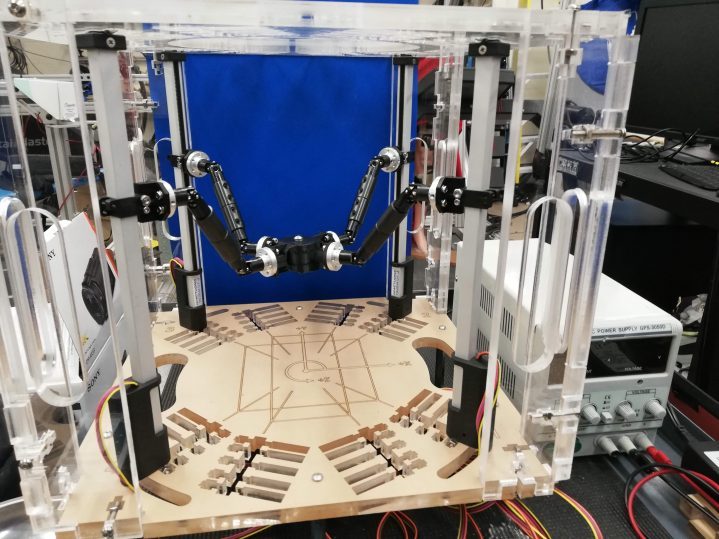
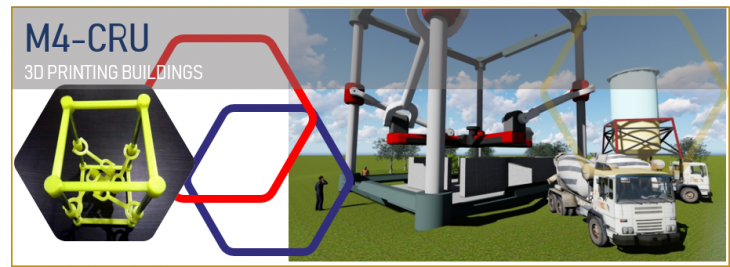
RECONFIGURABLE PARALLEL MANIPULATORS FOR BUILDING
Manipulator paralel yang dapat dikonfigurasi ulang akan sangat efisien untuk mencetak bentuk kompleks atau geometri overhang tiga dimensi. Platform dapat berpindah secara terus menerus dari satu jenis gerakan ke jenis lainnya dengan menggunakan beberapa solusi, yaitu sabuk, rem, sambungan yang dapat dikunci, dll. Proses konfigurasi ulang memerlukan analisis sesuai dengan kinematika dan dinamika yang terjadi. Secara garis besar penelitian ini dapat dilihat dalam video pada LINK INI.
Tim: Latifah Nurahmi, Bambang Pramujati, Moch. Solichin
Partner:
- Guowu Wei, Salford University, Manchester, United Kingdom
- Sunil Agrawal, Columbia University, New York City, United States
Project:
- Newton Funds – Royal Academy of Engineering, Industry-Academia Partnership Program 2018-2020
Publikasi:
- Solichin, M., Nurahmi, L., Putro, B., Power prediction of a 4-CRU parallel mechanism based on extra gradient boosting regressor, AIP Conference Proceedings Vol. 2187 (2019)
- Putrayudanto, P., Nurahmi, L., Wei, G., Multi Operation Modes of 4-CRU Parallel Mechanism For 3D-Printing Building, Mechanism and Machine Science pp.1-13 (2021)
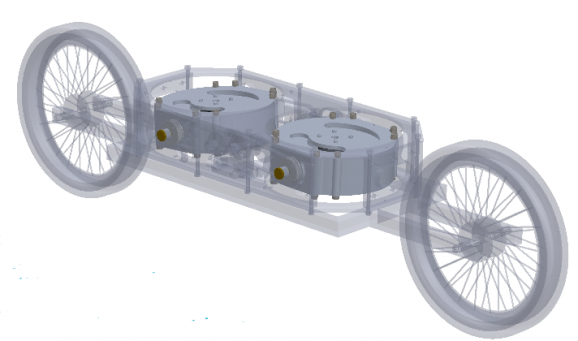

CONTROL MOMENT GYROSCOPE STABILIZATION OF UNSTABLE VEHICLES
Aspek terpenting dari kesetimbangan kendaraan roda dua adalah kemungkinan hilangnya kesetimbangan vertikal dan masalah ini sangat mirip dengan masalah klasik dalam teori pengendalian yaitu kestabilan pendulum terbalik. Penelitian ini akan memformulasikan dan membuktikan konsep pengendalian kendaraan roda dua yang dianalogikan sebagai pendulum terbalik dengan sistem aktuasi Control Moment Gyroscope.
Tim: Unggul Wasiwitono, Arif Wahjudi, Ari Kurniawan S, Yohanes
Publikasi:
- Wasiwitono, U., Wahjudi, A., Saputra, A.K., Yohanes., Stabilization and Disturbance Attenuation Control of the Gyroscopic Inverted Pendulum, Journal of Vibration and Control (2020)
- Wasiwitono, U., Constrained H∞ Control Application to Inverted Pendulum with Control Moment Gyroscope, International Conference on Advanced Mechatronics, Intelligent Manufacture And Industrial Automation (2019)
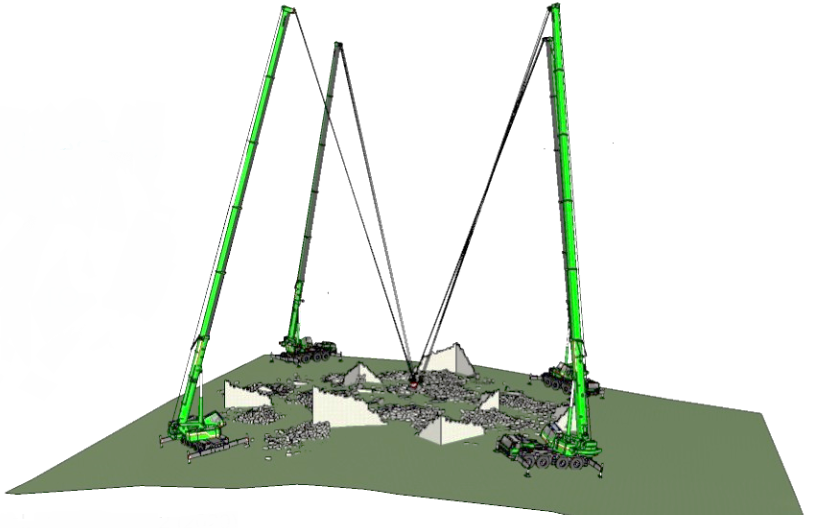
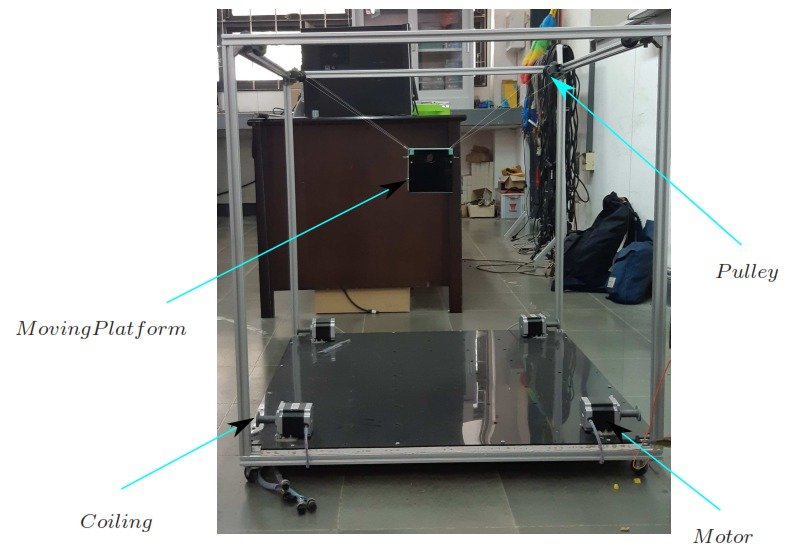
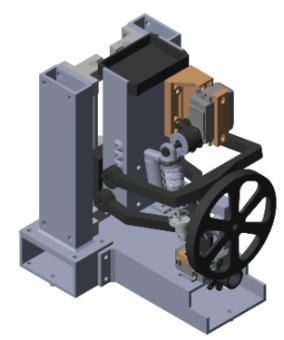
CABLE ROBOT WITH MOBILE CRANES
Pada daerah yang terkena dampak gempa bumi atau tsunami, proses pencarian dan penyelamatan bisa sangat sulit karena akses yang terbatas. Untuk mengatasi masalah ini, maka robot kabel dengan mobile crane dikembangkan. lengan-lengan setiap mobile crane dapat dikonfigurasi ulang yang memungkinkan robot menjadi lebih mudah beradaptasi dan kuat. Pekerjaan pada keseimbangan statis dan dinamis diperlukan. Strategi kontrol harus disintesis karena kabel hanya dapat menarik tetapi tidak bisa mendorong.
Tim: Latifah Nurahmi, Bambang Pramujati
Partner:
- Stephane Caro, LS2N, Ecole Centrale de Nantes, France
- M. Nasyir Tamara, Politeknik Elektronika Negeri Surabaya
Project:
1. Kemristekdikti Kerjasama Luar Negeri 2018-2020
2. PHC – Nusantara 2016-2017
Publikasi:
- Syamlan, A.T., Nurahmi, L., Tamara, M.N., Pramujati, B., Dynamic Trajectory Planning of Reconfigurable Suspended Cable Robot, International Journal of Dynamics and Control, Vol. 8, issue.2 (2020)
- Syamlan, A.T., Nurahmi, L., Tamara, M.N., Pramujati, B., Dynamic Trajectory Generation of Suspended Cable-Driven Parallel Robot, AIP Conference Proceedings 2187 (2019)
ACTIVE VARIABLE GEOMETRY SUSPENSION
Sistem suspensi merupakan komponen pada kendaraan. Fungsi utama suspensi kendaraan adalah mengisolasi getaran yang timbul karena ketidakrataan jalan. Penelitian ini mempelajari sistem suspensi jenis Low Bandwidth Active Suspension, dimana gaya aktuasi diberikan dengan mengubah orientasi single link yang menghubungkan sprung mass dengan link pegas dan damper.
Tim: Unggul Wasiwitono, Agus Sigit P, Nyoman Sutantra, Yunarko
Publikasi:
- Wasiwitono, U., Pramono, A.S., Sutantra, I.N., Study on influences of linkage geometry on actively controlled double wishbone suspension, AIP Conference Proceedings 1983 (2018)
- Wasiwitono, U., Sutantra, I.N., Constrained H∞ Control for Low Bandwidth Active Suspension, AIP Conference Proceedings 1867 (2017)
- Wasiwitono, U., Pramono, A.S., Sutantra, I.N., Triwinarno, Y., Influence of Spring Ratio on Variable Stiffness and Damping Suspension System Performance, Applied Mechanics and Materials, Vol. 836, pp. 31-36, (2016)
2. GRUP RISET REKAYASA SISTEM INDUSTRI
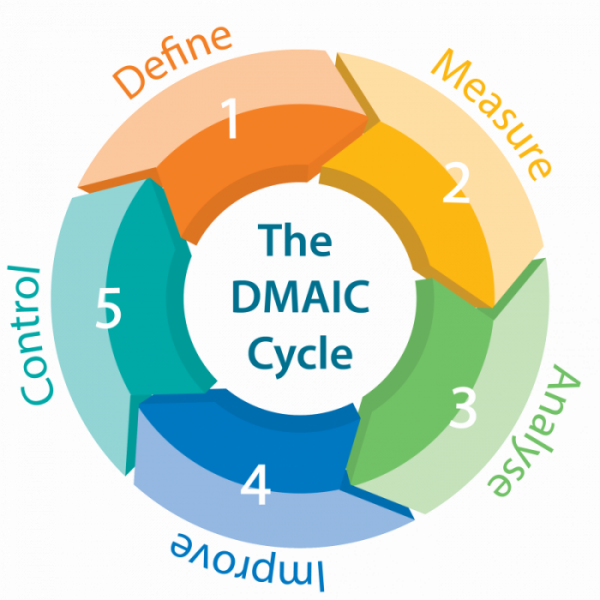
LEAN SIX-SIGMA
Lean six sigma adalah metode yang mengandalkan upaya tim secara kolaboratif untuk meningkatkan kinerja dengan menghilangkan pekerjaan non-produktif secara sistematis. Dengan memperkenalkan Lean Six Sigma, pola pikir karyawan dan manajer berubah menjadi pola pikir yang berfokus pada pertumbuhan dan peningkatan berkelanjutan melalui optimalisasi proses untuk memaksimalkan efisiensi dan meningkatkan profitabilitas.
Tim: Witantyo, Abdullah Shahab, Suwarno
Publikasi:
- Witantyo., Setyawan, d., Enhancement of Efficiency and Reduction of Grid Thickness Variation on Casting Process with Lean Six Sigma Method, IOP Publishing ltd (2018)
- Witantyo., Ranaindyb, N., Waste Analysis to Improve Container Port Performance Using Lean Six Sigma Method, AIP Conference Proceedings 2187 (2019)
PREDICTIVE MAINTENANCE FOR INDUSTRI 4.0
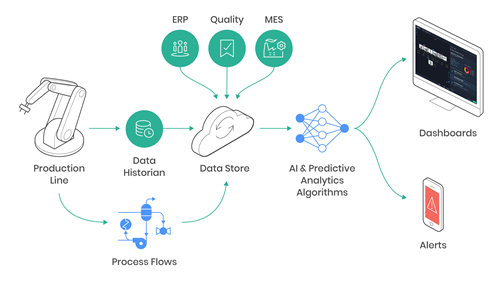
Pemeliharaan prediktif pada industri 4.0 adalah metode untuk mencegah kegagalan aset dengan menganalisis data maintenance untuk mengidentifikasi pola dan memprediksi suatu masalah. teknologi industri IOT diterapkan untuk memantau kesehatan aset, mengoptimalkan jadwal perawatan sehingga produsen dapat menurunkan biaya produksi, memaksimalkan waktu kerja, dan meningkatkan hasil produksi.
Tim: Witantyo, Ari Kurniawan S, Suwarmin
Publikasi:
- Witantyo., Rindiyah, A., Decreasing Inventory of a Cement Factory Roller Mill Parts Using Reliability Centered Maintenance Method, Journal of Physics: Conference Series Paper (2018)
KEGIATAN AKADEMIK
Sarjana (S1)
Mata Kuliah Wajib
- Instrumentasi dan Pengukuran + Praktikum (4 sks)
- Manajemen Operasional (4 sks)
- Teknik dan Manajemen Perawatan (3 sks)
- Sistem Dinamik & Pengendalian (4 sks)
- Mekatronika + Praktikum (4 sks)
Mata Kuliah Pilihan
- Sistem Manufaktur Industri (3 sks)
- Simulasi Sistem Dinamis (3 sks)
- Manajemen Proyek (3 sks)
- Sistem Pengendalian Linear (3 sks)
- Sistem tenaga Pneumatik dan Hidrolik (3 sks)
- Mekanisme Robot (3 sks)
Magister (S2)
Mata Kuliah Wajib
- Manajemen Proyek (3 sks)
- Keandalan dan Manajemen Pemeliharaan (3 sks)
Mata Kuliah Pilihan
- Pemodelan Sistem Dinamis (3 sks)
- Riset Operasional (3 sks)
- Sistem Pengendalian Linear (3 sks)
Doktor (S3)
Mata Kuliah Pilihan
- Riset Operasional (3 sks)
KEGIATAN LABORATORIUM
Syukuran Wisuda

Syukuran Wisuda 2023

Syukuran Wisuda 2024
Pelatihan

Pelatihan MATLAB 2023

Pelatihan MATLAB 2024

Pelatihan Grader Praktikum Sistem Dinamis
Pengabdian Masyarakat



1. Uji Prototype Mobile Cable Robot with Hor Tan



2. Talk Show with Jefrrey Hanafie, M56



Mahasiswa Sarjana
- Joel Darren Permana
- Made Bhaswara
- Dhiya Aldifa Ulhaq
Mahasiswa Pasca-Sarjana
- Nur Candra Dana Agusti (Asisten laboratorium)
- Aufar Rafdi
- Bayu Adhi
- Khafidz Azzarkhiyah
 Need help?
Need help?