Our main mission is to explore science, technology and social role of system and control engineering trough the utilization of robotics and maintenance management. The objectives of this mission is to replace human involvements in handling various industrial processes. The human behaviour, that seems unpredictable, unstructured, and uncertain become the obstacle that need to be overcome. We harness our members and partner’s collective skills and strengths and collaborated it into unique institution that is known as RSK Laboratory. Up until this point we actively involved in cross-discipline, cross-countries projects.
Lab. Rekayasa Sistem dan Kontrol
"Welcome to System and Control Engineering Laboratory Mechanical Engineering Department ITS"
“Nothing in life is to be feared, it is only to be understood. Now is the time to understand more, so that we may fear less.”
– Marie Curie –
Nobel prize winner in physics and chemistry


RESEARCH GROUP AND PUBLICATIONS
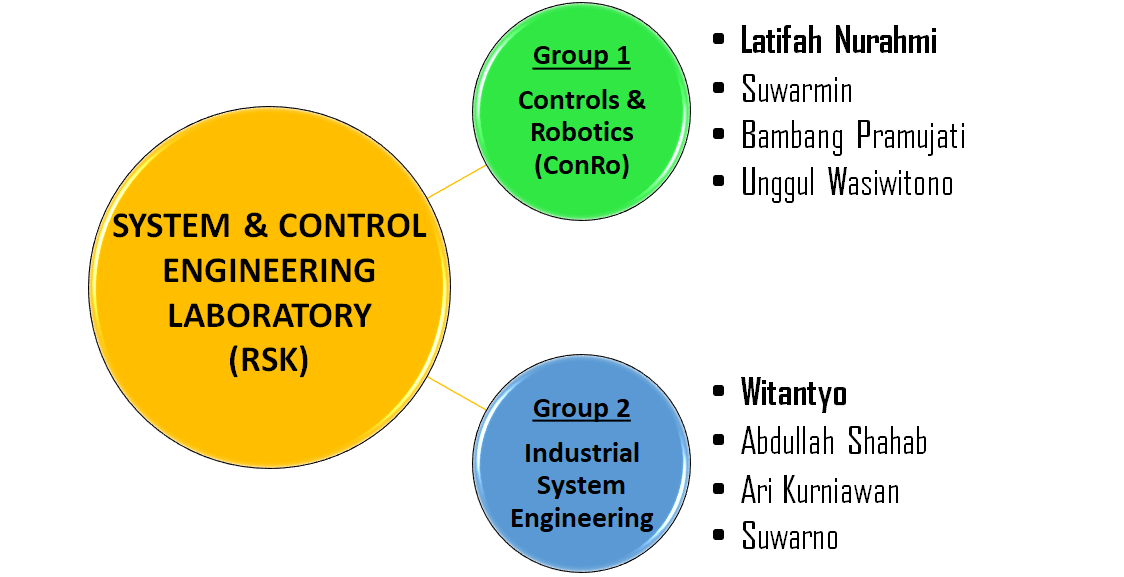
The System & Control Engineering Laboratory has 2 focus Research Groups, that are :
- Control & Robotics Research Group
- Industrial Systems Engineering Research Group
1. GRUP RISET KONTROL DAN ROBOTIKA

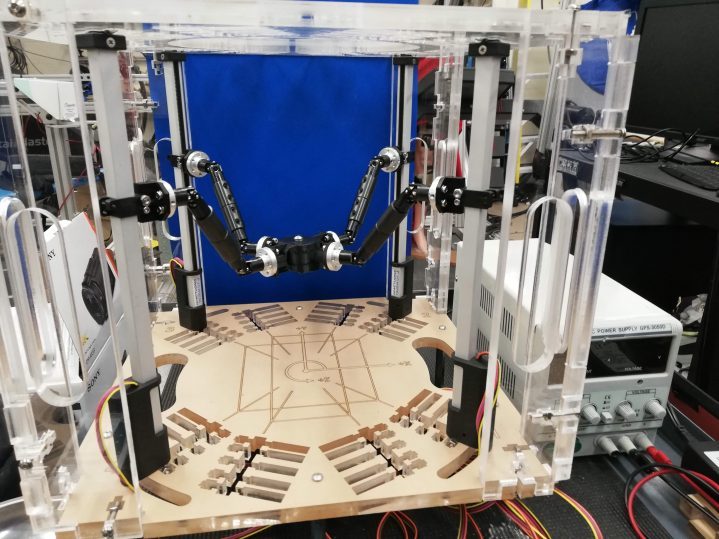
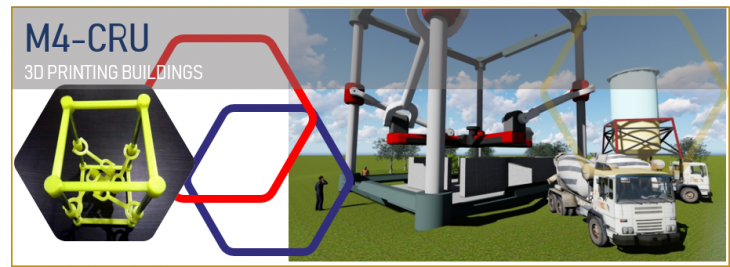
RECONFIGURABLE PARALLEL MANIPULATORS FOR BUILDING
Reconfigurable parallel manipulators can be very efficient forthree-dimensionally printing complex shapes or overhang geometry. The platform can continuously switch from one motion type to another by using several solutions, i.e. belts, brakes, lockable joints, etc. The reconfiguration process needs thorough analysis corresponding to kinematics and dynamics behavior. This research can be seen in the video on THIS LINK.
Team : Latifah Nurahmi, Bambang Pramujati, Moch. Solichin
Partner :
- Guowu Wei, Salford University, Manchester, United Kingdom
- Sunil Agrawal, Columbia University, New York City, United States
Project:
- Newton Funds – Royal Academy of Engineering, Industry-Academia Partnership Program 2018-2020
Publications:
- Solichin, M., Nurahmi, L., Putro, B., Power prediction of a 4-CRU parallel mechanism based on extra gradient boosting regressor, AIP Conference Proceedings Vol. 2187 (2019)
- Putrayudanto, P., Nurahmi, L., Wei, G., Multi Operation Modes of 4-CRU Parallel Mechanism For 3D-Printing Building, Mechanism and Machine Science pp.1-13 (2021)
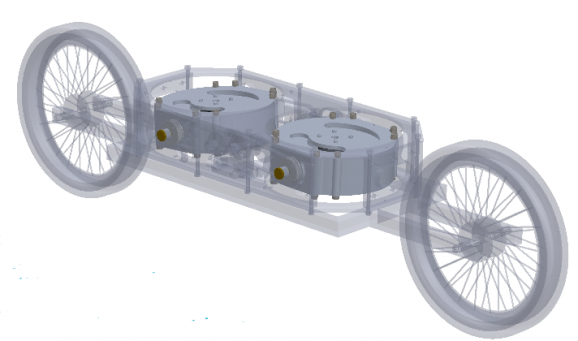

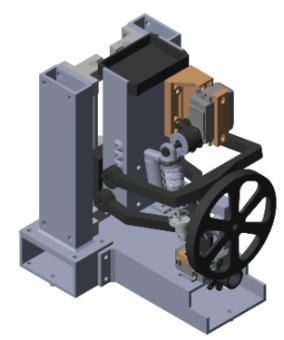
CONTROL MOMENT GYROSCOPE STABILIZATION OF UNSTABLE VEHICLES
The problem of stability of two-wheeled vehicle is very similar to the classic problem in control theory, namely the stability of the inverted pendulum. Conventionally, balancing the inverted pendulum is achieved by moving the base of the pendulum horizontally. This balancing method requires a large operating range of the moving base. A balancing system that allows the inverted pendulum to be stabilized on a much smaller area is a kind of balancer with inertial wheels or gyroscopic actuation. This research will formulate and prove the concept of controlling a two-wheeled vehicle which is analogous to an inverted pendulum with the gyroscopic actuation system.
Team: Unggul Wasiwitono, Arif Wahjudi, Ari Kurniawan S, Yohanes
Publications:
- Wasiwitono, U., Wahjudi, A., Saputra, A.K., Yohanes., Stabilization and Disturbance Attenuation Control of the Gyroscopic Inverted Pendulum, Journal of Vibration and Control (2020)
- Wasiwitono, U., Constrained H∞ Control Application to Inverted Pendulum with Control Moment Gyroscope, International Conference on Advanced Mechatronics, Intelligent Manufacture And Industrial Automation (2019)
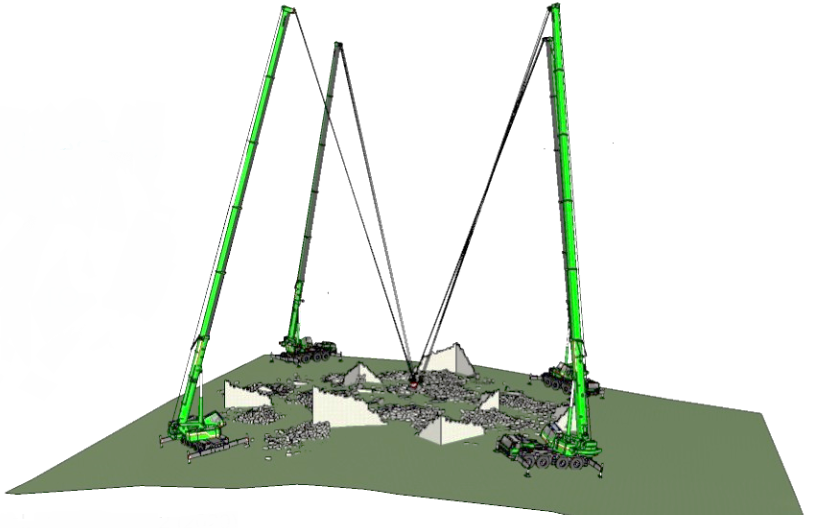
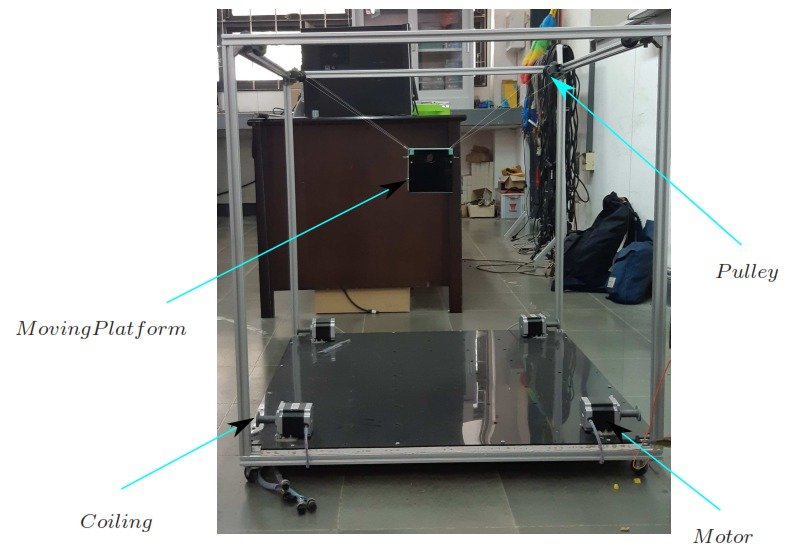
CABLE ROBOT WITH MOBILE CRANES
In an area affected by the earthquakes or Tsunami, search-and-rescue operation can be very difficult due to limited access. To address this problem, a cable robot with mobile cranes is developed. The boom of each mobile crane can be reconfigured which allows the robot to be more adaptable and robust. The works on static and dynamic equilibrium are required. The control strategy should be synthesized since the cable can only pull but cannot push.
Team: Latifah Nurahmi, Bambang Pramujati
Partner:
- Stephane Caro, LS2N, Ecole Centrale de Nantes, France
- M. Nasyir Tamara, Politeknik Elektronika Negeri Surabaya
Project:
1. Kemristekdikti Kerjasama Luar Negeri 2018-2020
2. PHC – Nusantara 2016-2017
Publications:
- Syamlan, A.T., Nurahmi, L., Tamara, M.N., Pramujati, B., Dynamic Trajectory Planning of Reconfigurable Suspended Cable Robot, International Journal of Dynamics and Control, Vol. 8, issue.2 (2020)
- Syamlan, A.T., Nurahmi, L., Tamara, M.N., Pramujati, B., Dynamic Trajectory Generation of Suspended Cable-Driven Parallel Robot, AIP Conference Proceedings 2187 (2019)
ACTIVE VARIABLE GEOMETRY SUSPENSION
The suspension system is a component of the vehicle that used to isolate the vibrations rising from road unevenness. This research explore the potential of the Active Variable Geometry Suspension (AVGS) for comfort and road holding enhancement. The AVG Stakes a conventional independent passive or semi-active suspension as its starting point, and improves its behavior by actively controlling the suspension geometry.
Tim: Unggul Wasiwitono, Agus Sigit P, Nyoman Sutantra, Yunarko
Publications:
- Wasiwitono, U., Pramono, A.S., Sutantra, I.N., Study on influences of linkage geometry on actively controlled double wishbone suspension, AIP Conference Proceedings 1983 (2018)
- Wasiwitono, U., Sutantra, I.N., Constrained H∞ Control for Low Bandwidth Active Suspension, AIP Conference Proceedings 1867 (2017)
- Wasiwitono, U., Pramono, A.S., Sutantra, I.N., Triwinarno, Y., Influence of Spring Ratio on Variable Stiffness and Damping Suspension System Performance, Applied Mechanics and Materials, Vol. 836, pp. 31-36, (2016)
2. GRUP RISET REKAYASA SISTEM INDUSTRI
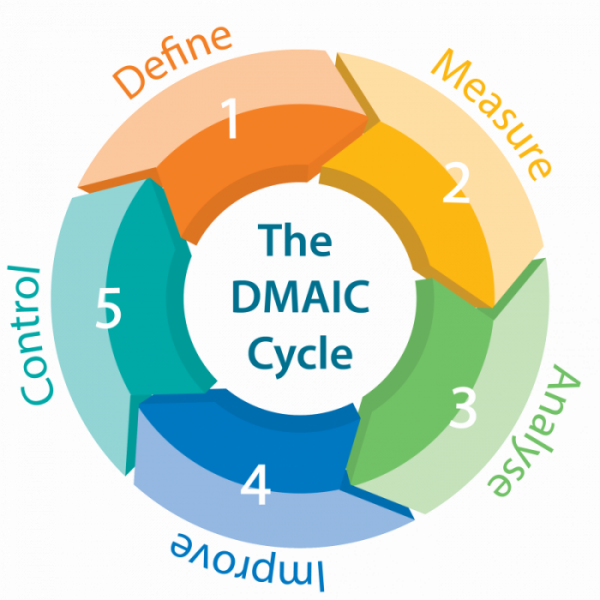
LEAN SIX-SIGMA
Lean six sigma is a method that relies on collaborative team efforts to improve performance by systematically eliminating non-productive work and reducing variation.By introducing Lean Six Sigma, the mindset of employees and managers has changed to a mindset that focuses on sustainable growth and improvement through process optimization to maximize efficiency and increase profitability.
Team: Witantyo, Abdullah Shahab, Suwarno
Publications:
- Witantyo., Setyawan, d., Enhancement of Efficiency and Reduction of Grid Thickness Variation on Casting Process with Lean Six Sigma Method, IOP Publishing ltd (2018)
- Witantyo., Ranaindyb, N., Waste Analysis to Improve Container Port Performance Using Lean Six Sigma Method, AIP Conference Proceedings 2187 (2019)
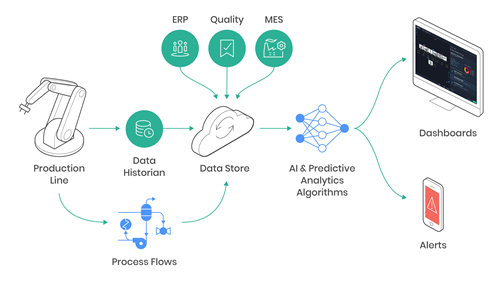
PREDICTIVE MAINTENANCE FOR INDUSTRI 4.0
Predictive maintenance for industry 4.0 is a method of preventing asset failure by analyzing production data to identify patterns and predict issues before they happen. Implementing industrial IoT technologies to monitor asset health and optimize maintenance schedules, allows manufacturers to lower service costs, maximize uptime, and improve production throughput.
Team: Witantyo, Ari Kurniawan S, Suwarmin
Publications:
- Witantyo., Rindiyah, A., Decreasing Inventory of a Cement Factory Roller Mill Parts Using Reliability Centered Maintenance Method, Journal of Physics: Conference Series Paper (2018)
ORGANIZATION OF LABORATORY
")
Ari Kurniawan Saputra, S.T., M.T.
Sinta | Scopus | Google Schoolar
Bidang: Robotika, Kontrol dan Otomasi
Email: arikurniawans@me.its.ac.id
")
Bambang Pramujati, PhD
Sinta | Scopus | Google Schoolar
Bidang: Robotika, Kontrol dan Otomasi
Email: pramujati@me.its.ac.id
")
Witantyo, M.Eng., SC
")
Unggul Wasiwitono, Dr-Eng

Suwarmin, MT.PE

Abdullah Shahab, Prof
")
Ari Kurniawan S, MT
Sinta | Scopus | Google Schoolar
Bidang: Robotika, Kontrol dan Otomasi
Email: arikurniawans@me.its.ac.id
KEGIATAN AKADEMIK
Sarjana (S1)
Mata Kuliah Wajib
- Instrumentasi dan Pengukuran + Praktikum (4 sks)
- Manajemen Operasional (4 sks)
- Teknik dan Manajemen Perawatan (3 sks)
- Sistem Dinamik & Pengendalian (4 sks)
- Mekatronika + Praktikum (4 sks)
Mata Kuliah Pilihan
- Sistem Manufaktur Industri (3 sks)
- Simulasi Sistem Dinamis (3 sks)
- Manajemen Proyek (3 sks)
- Sistem Pengendalian Linear (3 sks)
- Sistem tenaga Pneumatik dan Hidrolik (3 sks)
- Mekanisme Robot (3 sks)
Magister (S2)
Mata Kuliah Wajib
- Manajemen Proyek (3 sks)
- Keandalan dan Manajemen Pemeliharaan (3 sks)
Mata Kuliah Pilihan
- Pemodelan Sistem Dinamis (3 sks)
- Riset Operasional (3 sks)
- Sistem Pengendalian Linear (3 sks)
Doktor (S3)
Mata Kuliah Pilihan
- Riset Operasional (3 sks)
LABORATORY ACTIVITIES
Student Exchange
Student Exchange from France, Antoine Martin
Graduation Party


Laboratory Visit

Oleh Prof. Manfred Husty

Oleh Dr. Guowu Wei

Oleh Prof. Sunil K. Agrawal
Guidance











Mahasiswa Sarjana
- Aufar Rafdi
- Joel Darren Permana
- Made Bhaswara
- Dhiya Aldifa Ulhaq
Mahasiswa Pasca-Sarjana
- Alfiana Nur Hidayati (Asisten laboratorium)
- Pradiktio Putrayudanto (Double-Degree NCU Taiwan)
- Hor Tan (Kamboja)
- Sokmeangkeang Doung (Kamboja)
UPDATE 2022
Bravo! Semester ini, Lab RSK menyelenggarakan Mata Kuliah Topik Khusus yang akan disampaikan oleh dosen dari KU-Leuven


 Need help?
Need help?